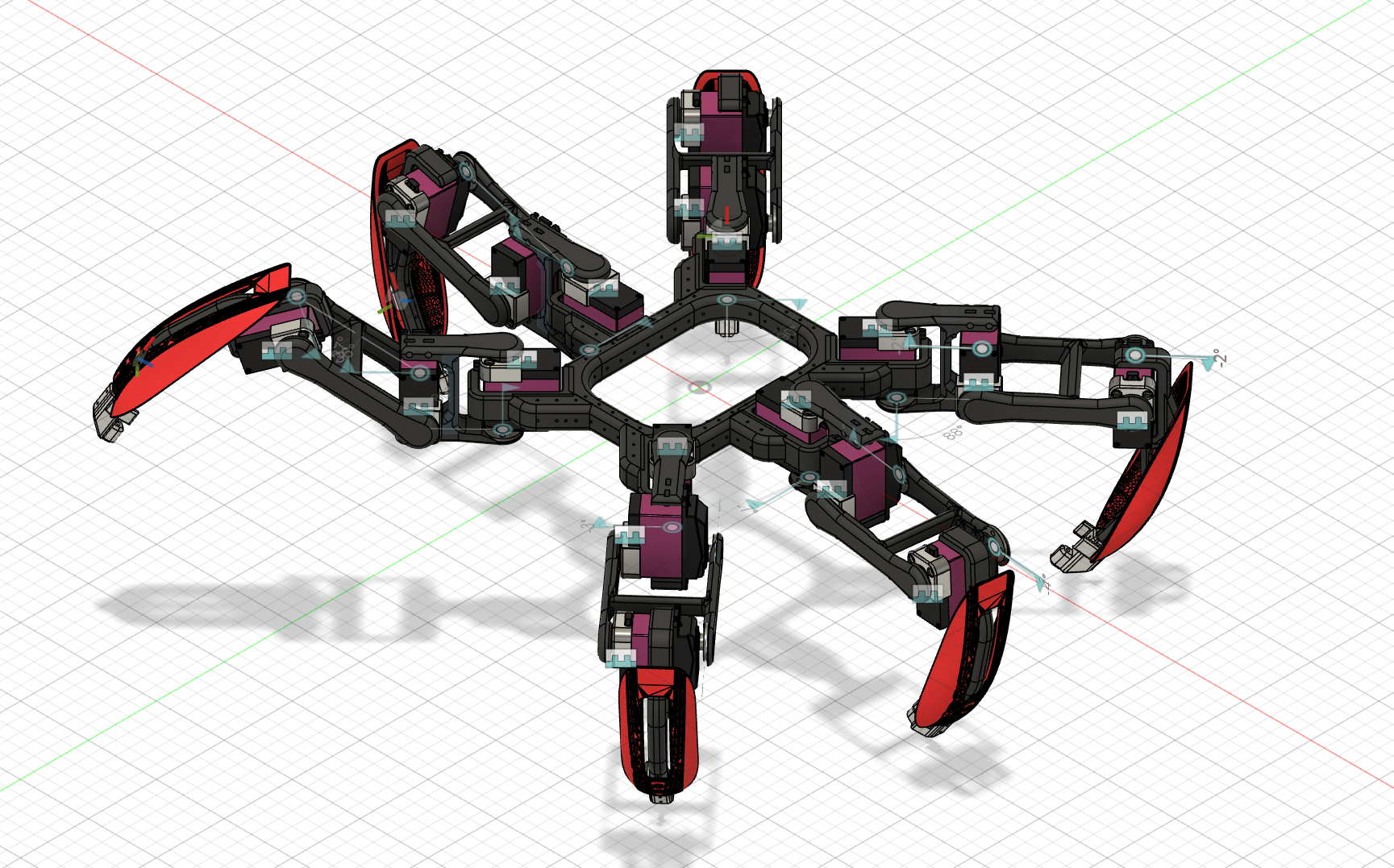
The Hexapod Robot project is a personal exploration into advanced robotics, combining mechanical design, kinematics, and electronics. The 3D modeling and assembly were completed using Autodesk Fusion 360, showcasing a robust and innovative structural design.
Key milestones achieved:
-
Inverse Kinematics: Successfully developed and implemented inverse kinematics algorithms for precise leg movement.
-
Electronics Integration: Planned the use of a Servo2040 stepper driver paired with a Raspberry Pi for seamless motor control and sensor integration.
-
Remote Control and Telemetry: Designed a system for Bluetooth joystick control and real-time remote monitoring via a mobile app.
The project demonstrates expertise in CAD, robotics programming, and interdisciplinary engineering design. Future steps include full hardware assembly, sensor calibration, and programming autonomous behaviors.